Скоростной рычаг
Рычаговый принцип работы опорно-двигательного аппарата
На тело человека всегда действуют силы тяжести, силы инерции, силы сопротивления среды и мышечные силы тяги, которые взаимодействуют и вызывают различные движения и перемещения тела и его частей в пространстве. Отдельные кости скелета можно представить себе как рычаги, на которые действуют мышечные силы, силы тяжести или другие внешние силы. Суставы, связывающие кости в звенья, обеспечивают необходимую подвижность частей тела, которая зависит не только от формы суставов, но и от работы мышц.
В механике рычагом называют твёрдое тело, имеющее точку опоры, около которой оно может вращаться под влиянием противодействующих друг другу сил. По отношению точек приложения силы мышцы и силы сопротивления к точке опоры различают рычаги первогоивторого рода. Если опора располагается между точками приложения сил, то это рычаг первого рода. Если же обе силы приложены с одной стороны опоры, то это рычаг второго рода. Для равновесия рычага первого рода силы должны быть направлены в одну сторону, а для равновесия рычага второго рода – в разные стороны. Основное свойство рычага любой формы при равновесии выражается равенством моментов сил.
Рычаг первого рода (рычаг равновесия). Примером такого рычага может служить череп с точкой опоры в атланто-затылочном сочленении, лежащей на фронтальной оси этого сустава. Точка приложения силы тяжести головы (центр тяжести головы) находится кпереди от точки опоры, точки приложения сил мышечных тяг разгибателей головы и шеи – кзади. Таз так же является рычагом первого рода с точкой опоры на поперечной оси тазобедренного сустава. В зависимости от положения туловища общий центр тяжести тела (ОЦТ) может занять положение кпереди или кзади от поперечной оси тазобедренного сустава. В этом случае равновесие тела обеспечивает сила мышечной тяги разгибателей позвоночного столба (ОЦТ - кпереди) или сгибателей (ОЦТ - кзади).
Рычаги второго рода имеют две разновидности. Первый, именуемый рычагом силы,характеризуется тем, что плечо мышечной тяги больше плеча силы тяжести. Примером такого рычага является стопа с точкой опоры на поперечной оси плюснофаланговых суставов. Сила тяжести тела приходится на таранную кость. Сила мышечной тяги трёхглавой мышцы голени направлено кверху, точка её приложения – пяточный бугор. Соответственно, при сгибании стопы трёхглавая мышца развивает усилие меньше чем тяжесть тела человека.
Вторая разновидность рычага второго рода именуется рычагом скорости.
В этом рычаге плечо силы тяжести превышает плечо силы мышечной тяги, то есть для преодоления силы тяжести мышцы должны развивать усилие больше, чем тяжесть звена тела или груза, удерживаемого им. Примером может служить предплечье с точкой опоры на поперечной оси локтевого сустава.
Одни и те же соединения костей могут выступать в определённых условиях, как рычаги первого, так и второго рода. Так, например, череп при свободном прямом держании головы является рычагом первого рода. При висе на зубах (как это делают артисты цирка) или при захвате головы под нижней челюстью в различных видах борьбы череп будет являться рычагом второго рода. В этих случаях внешним силам, разгибающим голову, будут противодействовать силы тяг всех мышц, прикрепляющихся к подъязычной кости, длинной мышцы головы, передней и латеральной прямых мышц головы. Стопа, как рычаг силы (рычаг второго рода) при некоторых условиях может выступать как рычаг скорости и рычаг равновесия. Так, например, в том случае, когда стопа не опирается о землю и свободно разгибается в голеностопном суставе, она будет функционировать как рычаг скорости. При ударе по мячу в футболе тыльной стороной стопы точка приложения равнодействующей силы мышц разгибателей стопы (передняя большеберцовая мышца, длинный разгибатель пальцев, длинный разгибатель большого пальца стопы) и точка приложения силы тяжести мяча будут расположены по одну сторону от поперечной оси вращения голеностопного сустава. Силы будут направлены в противоположные стороны, плечо равнодействующей силы мышц меньше плеча силы тяжести мяча, то есть в данном случае стопа будет являться рычагом скорости (рычаг второго рода).
В качестве рычага равновесия (рычага первого рода) стопа будет функционировать, например, при отталкивании тела от водной среды во время плавания стилем брасс, где силы тяги мышц сгибателей стопы будут противодействовать сопротивлению водной среды.
Знания рычагового принципа опорно-двигательного аппарата применяются при разработке спортивных тренажеров, с помощью которых удаётся нагружать как функциональные группы мышц, так и отдельные мышцы и даже определённые пучки мышц.
Список рекомендованной литературы
ОСНОВНАЯ
Козлов В.И. Анатомия человека. - М., 1978. - 547 с.
Иваницкий И.О. Анатомия человека. - Т. 1. - М., 1956. - 548 с.
Иваницкий Н.О. Анатомия человека. - М., 1985. – 544 с.
Дополнительная
Гладышева А.А. Анатомия человека. - М., 1977. - 343 с.
Привес М.Г. и др. Анатомия человека. - А., 1969. - 343 с.
Сапин М.Р., Билич Г.А. Анатомия человека. - М., 1989. - 544 с.
Синельников Р.Д. Атлас анатомии человека. - Т. 1. - М., 1972. - 458 с.
Синельников Р.Д. Атлас анатомии человека. - Т. 2. - М., 1973. - 468 с.
Синельников Р.Д. Атлас анатомии человека. - Т. 3. - М., 1974. - 399 с.
studfiles.net
Работа мышц | Анатомия человека
Работу мышц рассматриваются с позиции общих законов механики, где под работой понимается перемещение тела или груза на расстояния под действием силы, которая на него действует. Работа численно определяется как произведение силы мышцы на расстояние, на которое переместился объект под действием силы и выражается в килограмометрах. Работу мышц разделяют на преодолевательную, поступательную и удерживающую. Мышца выполняет преодолевательную работу тогда, когда она преодолевает сопротивление, перемещает тело, осуществляет поднятие тяжести или перемещение тела по поверхности. При поступательной работе мышца находится в напряженном состоянии, постепенно растягивается и действием второй силы уступает действия этой силы. Этот вид работы мышц является важным и необходимым для обеспечения плавности и эластичности движений. Работу мышц разделяют также на статическую и динамическую. При статической работе часть мышц напрягается и пытается уравновесить момент силы тяжести или силы сопротивления, это наблюдается при выравнивании или хранении положения тела и его частей. При этом мышца не сокращается, не продлевается, а только напрягается. Статическая работа мышц необходима для сохранения вертикального положения тела, или осанки. Динамическая работа мышц делится на преодолевательную и поступательную. Виды работы мышц в процессе построения движений часто чередуются. Примером может служить отведение руки в сторону, когда дельтовидная мышца выполняет преодолевательную работу; при удержании руки в горизонтальном положении выполняется статическая работа мышцы - удерживающая, при медленном приведении руки к туловищу - поступательная. Таким образом, при каждой разновидности движения на первый план выступает тот или иной вид работы. Работу опорно-двигательного аппарата рассматривают как систему рычагов. Рычагом называется всякое твердое тело, способное выполнять вращательные движения вокруг оси, на плечо которого действуют две противоположные силы: двигательная сила (мышечного сокращения) и сила сопротивления. В зависимости от величины двигательной силы и силы сопротивления возможно равновесие или движение рычага. В зависимости от размещения мышечного сокращения и силы сопротивления относительно оси вращения различают рычаги первого, второго и третьего рода.Рычаг первого рода, или рычаг равновесия является двуплечевым. В нем две силы расположены на концах рычага и направлены в одну сторону. Примером рычага равновесия является атланто-затылочное соединение и тазобедренный сустав.Рычаг второго рода, или рычаг силы является одноплечевым. В нем приложенная сила имеет противоположные направления. Двигательная сила приложена на длинное плечо рычага, а сила сопротивления - на короткое плечо. Примером рычага силы является голеностопный сустав, где одна сила действует вверх, а другая - вниз. Давление, которое возникает в оси вращения рычага, соответствует разнице действующих сил.Рычаг третьего рода, или рычаг скорости является одноплечевым. Рычаг скорости отличается от рычага силы тем, что сила мышечной тяги, приложенная близко возле точки сопротивления, образует меньшее плечо по сравнению со вторым плечом, на конце которого действует сила тяжести. Примером рычага скорости может служить локтевой сустав. При выполнении сгибания в локтевом суставе длинное плечо силы - предплечья осуществляет больший объем движений, чем короткое плечо силы, которое идет от лучевой бугристости до локтевого сустава. Таким образом, при действии на короткое плечо мышца выигрывает в скорости и расстояния, но проигрывает в силе.Пара сил. Для осуществления вращательных движений вокруг сустава необходима пара сил, то есть совокупность двух равных параллельных сил, направленных в противоположные стороны. Кратчайшее расстояние между линиями действия сил называется плечом пары. Таким кратчайшим расстоянием является перпендикуляр, опущенный из точки приложения одной силы на направление другого. Примером пары сил может служить сгибание предплечья в локтевом суставе двуглавой мышцей. Одной силой является сила мышцы, второй силой является сопротивление сустава со стороны плечевой кости, направленной в противоположную сторону.Параллелограмм сил. Располагаясь под углом друг к другу, мышцы тянут кость в двух разных направлениях, равнодействующая этих сил выражается диагональю параллелограмма, построенного на этих силах. Например, направление тяги каждого из таких мышц (которые наиболее крупные), приводящих плечо (большая грудная мышца и широчайшая мышца спины), не совпадают с направлением движения при приведении плеча. Кроме того, не существует направления силы тяги, которое полностью совпадало бы с направлением движения при приведении плеча, когда это движение осуществляется во фронтальной плоскости. Таким образом, две мышцы, образуя между собой параллелограмм сил, заменяют отсутствующую мышцу, которая необходима для выполнения этого движения. Правило параллелограммы сил относится не только к двум мышцам, но и в нескольких других, которые тянут кость в разных направлениях.Соответствующие разделы:
Болезни мышечной тканиСопутсвующие статьи:
Деформирующая мышечная дистонияПрогрессирующие мышечные дистрофииДоброкачественные опухоли мышечной тканиМышечная кривошеяanatomija.vse-zabolevaniya.ru
Взаимоотношение мышцы и костных рычагов | Биомеханические основы | Миология
Работу двигательного аппарата человека обычно излагают с позиций общих законов механики, вполне применимых для оценки системы опорно-двигательного аппарата как системы рычагов. Рычагом называется всякое твердое тело, способное совершать вращательные движения около оси, на плечи которого действуют две противоположные силы: движущая сила (мышечные сокращения) и сила сопротивления. В зависимости от величины движущей силы и силы сопротивления возможно равновесие или движение рычага. Для понимания равновесия или движения рычага необходимо иметь определенное представление о плече рычага и о моменте вращения силы.
Плечом рычага называют расстояние оси вращения (О) до точки приложения силы (OA и ОБ). Плечом силы называют кратчайшее расстояние — перпендикуляр от оси вращения до вектора силы или его продолжения (OAI и ОБI (рис. 158).
158. Схема рычага. Плечи рычага (OA и ОБ), плечи сил (OAI и ОБI).Участие каждой мышцы в выполнении движений зависит не только от величины подъемной силы, но также и от величины плеча рычага, что определяется моментом силы. Моментом силы называется произведение силы на ее плечо. Моментом силы FI будет произведение FI·OAI, или FI·Sin OA; моментом силы FII будет FII·OБI или FII·SinОБ. Таким образом, условие для равновесия рычага достигается тогда, когда сумма моментов сил, действующих на него, относительно оси вращения равна нулю. Если равенство моментов сил нарушается, то рычаг начинает вращаться в направлении той силы, момент которой больше. Момент силы является непостоянной величиной, обусловленной положением одних костей по отношению к другим, образующим данное сочленение. Поэтому при сгибании в суставе будет нарастать плечо рычага сгибателей и соответственно момент силы, т. е. увеличивается угол подхода сухожилия к мышце, что способствует повышению подъемной силы мышцы. В большей части случаев мышцы прикрепляются вблизи суставов и подходят к костям под острым углом. При этом плечо силы меньше плеча сопротивления; при подобном прикреплении мышцы проигрывают в силе.
В опорно-двигательной системе имеются образования, способствующие увеличению плеча силы мышц, благодаря чему значительно повышается момент силы. К этим образованиям относятся сесамовидные кости, блоки, костные отростки и бугры, разнообразные выступы и шероховатости. За счет этих образований значительно возрастает момент силы мышц. Следовательно, сила мышцы зависит не только от количества мышечных волокон, но и от плеча рычага.
Виды рычагов. В зависимости от расположения движущей силы (мышечное сокращение) и силы сопротивления относительно оси вращения различают рычаги первого, второго и третьего рода.
Рычаг первого рода является двуплечим. Обе силы имеют одинаковое направление, а между ними находится ось вращения данного рычага (рис. 159). Рычаг первого рода называют также рычагом равновесия. Например, атлантозатылочное сочленение и тазобедренный сустав представляют оси вращения рычагов первого рода, по сторонам от которых располагаются плечи рычагов.
159. Двуплечий рычаг первого рода, например положение головы.а — поперечная ось атлантозатылочного сочленения;бг — направление силы тяжести;ед — направление мышечной тяга;ав — плечо рычага силы тяжести;аж — плечо силы мышечной тяги.
160. Стопа как рычаг второго рода. а — точка опоры; бе — направление силы тяжести; дг — направление равнодействующей силы мышечной тяги; ае — плечо рычага силы мышечной тяги; аж — плечо рычага силы тяжести.161. Предплечье как рычаг третьего рода. аб — направление равнодействующей мышц-сгибателей предплечья; вг — направление силы тяжести или сопротивления, же — плечо рычага силы тяжести; де — плечо рычага силы мышечной тяги; ж — плечо рычага силы тяжести; аз — «полезная» составляющая силы мышечной тяги; ак — другая составляющая этой силы; е — поперечная ось вращения локтевого сустава.
Рычаг второго рода — одноплечий рычаг, так как приложения сил имеют противоположные направления. Движущая сила оказывает действие на длинное плечо рыча га, а сила сопротивления — на короткое плечо (рис. 160). Например, в голеностопном суставе одна сила действует вверх, другая — вниз. Давление, которое возникает в оси вращения рычага, соответствует разности действующих сил. Действие мышцы в конструктивной особенности рычага второго рода направлено на выполнение движений, требующих большой мышечной силы, поэтому рычаг второго рода называют также рычагом силы.
Рычаг третьего рода хотя и является одноплечим рычагом, но его отличие от рычага второго рода заключается в том, что сила действует на короткое плечо, а плечо сопротивления — на длинное (рис. 161). Рычаг третьего рода можно назвать рычагом скорости. Например, при выполнении сгибания в локтевом суставе длинное плечо силы — предплечье — совершает больший размах движений, чем короткое плечо силы, идущей от лучевой бугристости до локтевого сустава. Таким образом, при действии на короткое плечо мышца выигрывает в скорости и расстоянии и проигрывает в силе.
В процессе построения движений у человека постоянно наблюдаются различные биомеханические особенности в смене, разделении и объединении различных рычагов, что необходимо для выполнения движений с наибольшей экономией энергии.
Кинематические цепи и степени свободы. Рассмотренная выше система костных рычагов первого, второго и третьего рода представляет рабочую систему в механическом значении только при определенных условиях. Одним из этих условий являются открытые и закрытые кинематические цепи и степени свободы. В замкнутой системе кинематической цепи оба конца какой-либо части тела закреплены (ребра, закрепленные передними и задними концами, или нижние конечности при стоянии).
При выполнении движений всегда вовлекаются цепи звеньев двигательного аппарата, которые закреплены на одном конце (рука, прикрепленная одним концом к лопатке) и представляют открытую кинематическую цепь.
162. Пять степеней свободы тела, соприкасающегося одной точкой с другим телом.В открытой системе кинематической цепи объем движений концевого отдела части тела определяется путем сложения суммы степеней свободы всех промежуточных звеньев, составляющих эту часть тела. Не ограниченное в свободе перемещающееся тело обладает шестью степенями свободы в виде поступательного движения в трех измерениях (вверх вниз, вперед назад, вправо влево) и вращательных движений в тех же измерениях. При скреплении одного звена тела в отношении другого ограничиваются степени свободы. При анализе возможных движений двух твердых тел (например, в шаровидном суставе), соприкасающихся в одной точке, видно, что тела способны переместиться взаимно в пяти направлениях и сохранить пять степеней свободы (рис. 162). Эти пять степеней свободы возможны в суставе только теоретически, а фактически подвижность в суставах имеет только три степени свободы. Это ограничение создают капсулы, связки и мышцы, окружающие сустав. Тремя степенями свободы обладают шаровидные суставы, двумя — эллипсоидные, седловидные и мыщелковидные (коленный сустав), одной — цилиндрические и блоковидные. Свободная верхняя конечность представляет открытую кинематическую цепь. Плечевой сустав обладает тремя степенями свободы, локтевой сустав — одной, суставы между костями предплечья — одной, лучезапястный сустав — двумя степенями свободы. Таким образом, кисть способна относительно туловища совершать перемещение по 7 степеням свободы в пределах радиуса всей верхней конечности, имея полную свободу движений.
Если сопоставить соединения в суставах с соединениями частей технической машины, то обнаруживаются существенные отличия. У машины движения единообразны и обладают только одной степенью свободы.
Как указывалось выше, движения у человека складываются в кинематические цепи и практически не осуществляются суставом с одной степенью свободы, поэтому двигательный аппарат человека не является рабочей машиной. Он становится ею только тогда, когда благодаря напряжению мышц исключаются и тормозятся движения, при которых как бы дополнительно возникают «запирающие» сустав механизмы. Тонус мышц и его чередование направляют движения в суставах, тем самым «... устраняются все свободы перемещения, за исключением одной». Следовательно, за счет перераспределения работы мышц и их тонуса возможно построение многих механизмов с различным числом степеней свободы.
Пара сил. Выше говорилось, что для совершения вращательного движения необходима пара сил, которая складывается из сил сокращающейся мышцы и силы давления или сопротивления, возникающего от трения одной кости о суставную поверхность другой. На примере сгибания в локтевом суставе видно (рис. 163), что сила тяги двуглавой мышцы может быть разложена на составляющие: АБ — момент силы и АГ — силу давления костей предплечья на плечевую кость. Сила, распространяющаяся по диагонали АВ, представляет давление, производимое вдоль плечевой кости, которому противодействует сила давления ДЖ, разложенная на ДЕ и ДЗ. Момент силы АБ вместе с силой ДЖ представляет пару сил, выполняющих сгибание в локтевом суставе. Если бы сила давления отсутствовала, а это возможно при отсутствии оси вращения, то вместо сгибания в локтевом суставе произошло бы подтягивание предплечья. Зная условия, при которых изменяется плечо силы тяги мышц, и механические условия проявления мышечной силы, легко понять, каким образом в процессе построения движений происходит потеря или увеличение мышечной силы.
163. Схема действия «пары сил» (по М.Ф. Иваницкому). ав — равнодействующая двуглавой мышцы плеча; дж — противодействие со стороны плечевой кости; аб — «полезная» составляющая двуглавой мышцы плеча; аг — другая составляющая той же мышцы, способствующая давлению предплечья на плечо в локтевом суставе; де — составляющие силы давления плечевой кости на предплечье; ад — плечо пары сил, из которых одна сила аб, а другая — де. Благодаря работе пары сил сокращение двуглавой мышцы плеча способствует сгибанию в локтевом суставе.Виды мышечной работы. С позиций биомеханики работа мышцы определяется в том случае, когда она производит перемещение части тела или тяжести на какое-либо расстояние. В действительности мышца выполняет работу, начиная с малейшего ее напряжения.
Мышечная работа разделяется на статическую и динамическую.
При статической работе часть мышц, напрягаясь, стремится уравновесить момент силы тяжести или силу сопротивления, что наблюдается при выравнивании или сохранении положения тела или его частей. При этом мышца не укорачивается, не удлиняется, а только напрягается. Статическая работа мышц необходима для сохранения вертикального положения тела или определенной позы. Выделяют три вида статической работы мышц: удерживающую, укрепляющую и фиксирующую. При удерживающей работе мышцы действуют своим моментом тяги, возникающей при сокращении, против момента силы тяжести. При укрепляющей работе напряжение мышц оказывает сопротивление разрыву. При фиксирующей работе сокращение мышц-антагонистов оказывает фиксирующее влияние на суставы.
При динамической работе движение в суставах происходит в результате несоответствия мышечных и механических сил. Динамическая работа мышц подразделяется на преодолевающую и уступающую. При преодолевающей работе мышечная сила больше противодействующей силы и в результате сокращения мышц преодолевается сопротивление, т. е. производится перемещение части тела или груза. Уступающая работа мышц возникает в том случае, если мышечные силы меньше момента противодействующих сил и наступает растягивание сокращенной мышцы. Этот вид работы мышц является важным и необходимым для обеспечения плавности и эластичности движений. Если бы не было подобного регулятора, движения были бы толчкообразными и малокоординированными.
Виды мышечной работы в процессе построения движений часто чередуются. Например, при отведении руки дельтовидная мышца выполняет преодолевающую работу. При удержании руки в горизонтальном положении производится статическая (удерживающая) работа мышцы, а при приведении этой руки— уступающая работа. Таким образом, в каждом виде движений на первый план выступает тот или другой вид мышечной работы.
Антагонисты и синергисты. К антагонистам относятся все мышцы, которые по своей функции действуют в сторону, противоположную другой группе мышц. Например, мышцы-сгибатели плеча являются антагонистами разгибателей плеча. К синергистам относятся все мышцы, которые, сокращаясь, одновременно действуют на сустав, находясь по одну сторону его оси. Примером могут служить сгибатели предплечья и плеча, вызывающие сгибание в локтевом суставе. Функции антагонистов и синергистов могут чередоваться. При выполнении сгибания и разгибания в лучезапястном суставе, с одной стороны, лучевой и локтевой сгибатели, а с другой — разгибатели кисти являются антагонистами. И, наоборот, если выполнять приведение и отведение кисти, они становятся синергистами.
Одно- и многосуставные мышцы. Односуставные мышцы оказывают влияние на один сустав, многосуставные — вовлекают в движение два сустава и более. Относительная длина одно- и многосуставных мышц различная. Односуставные мышцы имеют достаточную длину, чтобы обеспечить размах движений по полной дуге, возможной в данном суставе. Многосуставные мышцы относительно короче и не могут обеспечить такой размах во всех суставах при одновременном движении. В этом легко убедиться на примере работы мышц, находящихся около тазобедренного сустава. При разогнутом коленном суставе амплитуда сгибания в тазобедренном суставе будет меньше, чем при согнутом коленном суставе. При разогнутом коленном суставе мышцы задней поверхности бедра (а они многосуставные) натягиваются, так как их относительная длина будет меньше, и это тормозит сгибание в тазобедренном суставе. Следовательно, степень подвижности в суставах не только определяется формой сустава и его связочным аппаратом, но и зависит от длины мышц, которые не всегда могут использовать всю резервную возможность для сокращения и полностью выполнить движение. Особенностью функции многосуставных мышц является их участие в мышечной координации, т. е. приспособительной особенности организма. При мышечной координации значительно экономятся затраты мышечной энергии. При многих движениях необходимо активное сокращение только односуставных мышц, а в других суставах совершается движение за счет тонуса, эластичности многосуставных мышц и силы тяжести. Эта координирующая работа многосуставных мышц хорошо выражена на нижней конечности. При сокращении мышц, лежащих впереди тазобедренного сустава, происходит сгибание не только бедра, но и в коленном суставе. Сгибание в коленном суставе наступает вследствие относительной недостаточности длины многосуставных задних мышц бедра. Разгибание в голеностопном суставе совершается благодаря расслаблению икроножной мышцы. Следовательно, только сокращение одной передней группы мышц около тазобедренного сустава приводит без затраты энергии по принципу координации к выполнению движений в коленном и голеностопном суставах. При выполнении противоположного движения (разгибание в тазобедренном суставе) произойдет пассивное разгибание в коленном суставе за счет относительной недостаточности передних мышц бедра, а в голеностопном суставе наступит сгибание вследствие повышения тонуса икроножной мышцы.
Сложение сил сокращающихся мышц. При сокращении мышцы возникает активная двигательная сила, которая стремится сблизить punctum mobile и punctum fixum. Мышечная сила характеризуется степенью сокращения мышцы, способной при возбуждении удержать в этом состоянии груз до 4—6 кг на 1 см2 поперечника мышцы. Величина силы зависит от исходной длины мышечных волокон. Предварительно, но не чрезмерно растянутая мышца развивает более высокое напряжение. Активная мышечная сила больше всего развивается в мышцах, построенных из длинных волокон (широкие и веретенообразные мышцы). Мышца может сократиться на 50—57% первоначальной ее длины, но ввиду ограничения степеней свободы суставов она сокращается, как правило, на 35%.
Активная мышечная сила группы мышц (синергистов или антагонистов) складывается из суммы подъемной силы каждой мышцы, а точка приложения этой силы располагается между местами прикрепления всех длинных мышц. Однако у человека только единичные мышцы занимают параллельное друг другу положение. Большей частью их равнодействующие находятся под определенным углом, образуя параллелограммы сил.
Параллелограммы сил. Располагаясь под углом друг к другу, мышцы тянут кость в различных направлениях. В этом случае движение кости совершается не по равнодействующей одной или второй мышцы, а по диагонали параллелограмма, построенного сокращающимися мышцами (рис. 164). Параллелограммы сил могут формироваться и целыми мышечными группами.
164. Параллелограмм сил (по М. Ф. Иваницкому).аб — направление тяги большой грудной мышцы;аг — направление тяги широчайшей мышцы спины. При совместной работе эти мышцы тянут плечевую кость в направлении ав, т.е. по диагонали параллелограмма сил.
www.medical-enc.ru
Т. Простые механизмы — PhysBook
Простейшие механизмы
Для облегчения совершения механической работы издавна используются различные приспособления — простые механизмы.
Простые механизмы — это устройства, в которых работа совершается только за счет механической энергии. Простые механизмы (рычаг, наклонная плоскость, блок и др.) служат для преобразования силы, их применяют при совершении работы в тех случаях, когда надо действием одной силы уравновесить другую силу.
Наклонная плоскость
Ее используют в тех случаях, когда надо поднять тяжелый груз на некоторую высоту.
Рассмотрим гладкую наклонную плоскость (рис. 1). Рассчитаем силу F, которую надо приложить к телу массой m, чтобы поднять его равномерно на высоту h.
Рис. 1
Запишем основное уравнение динамики\[~\vec F + \vec N + m \vec g = 0\]. Спроецируем это равенство на ось Ox\[~F - mg \sin \alpha = 0\]. Отсюда искомая сила
\(~F = mg \sin \alpha = mg \frac hl \Rightarrow \frac{mg}{F} = \frac lh,\)т.е для равномерного поднятия груза с помощью наклонной плоскости необходимо приложить силу, во столько раз меньшую силы тяжести груза, во сколько раз длина наклонной плоскости больше ее высоты.
Рычаг
Рычагом называют имеющее неподвижную ось вращения твердое тело, на которое действуют силы, стремящиеся повернуть его вокруг этой оси. Различают рычаги первого и второго рода.
Рычагом первого рода называют рычаг, ось вращения О которого расположена между точками А и В приложения сил, а сами силы направлены в одну сторону (рис. 2, а). Это коромысло равноплечих весов, железнодорожный шлагбаум, ножницы и др.
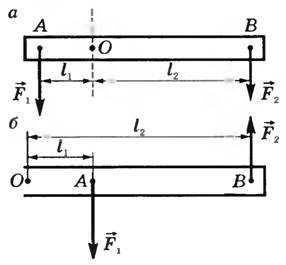
Рис. 2
Рычаг второго рода — рычаг, ось вращения О которого расположена по одну сторону от точек приложения сил, а сами силы направлены противоположно друг другу (рис. 2, б). Это гаечные ключи, щипцы для раскалывания орехов, двери и др.
Условие равновесия рычага вытекает из правила моментов M1 = M2.
Так как M1 = F1l1 и M2 = F2l2, где l1 и l2 — плечи сил, действующих на рычаг, то \(~\frac{F_1}{F_2} = \frac{l_2}{l_1}\) — условие равновесия рычага.
При равновесии рычага под действием двух сил модули этих сил обратно пропорциональны их плечам.
С помощью рычага можно получить выигрыш в силе, т.е. меньшей силой можно уравновесить большую силу.
Блок
Блоки используют для поднятия грузов. Блок представляет собой колесо с желобом, укрепленное в обойме. По желобу блока пропускают веревку, трос или цепь. Неподвижным называют такой блок, ось которого закреплена и при подъеме грузов она не поднимается и не опускается (рис. 3, а, б).
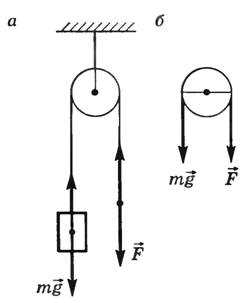
Рис. 3
Неподвижный блок можно рассматривать как равноплечий рычаг, у которого плечи приложенных сил равны радиусу колеса. Следовательно, из правила моментов mgr = Fr вытекает, что неподвижный блок выигрыша в силе не дает (F = mg). Он позволяет менять направление действия силы.
Рис. 4
На рисунке 4, а, б изображен подвижный блок (ось блока поднимается и опускается вместе с грузом). Такой блок поворачивается около мгновенной оси О. Правило моментов для него будет иметь вид
\(~mgr = F \cdot 2r \Rightarrow F = \frac{mg}{2}.\)Таким образом, подвижный блок дает выигрыш в силе в два раза.
Обычно на практике применяют комбинацию неподвижного блока с подвижным (рис. 5). Неподвижный блок применяется только для удобства. Он, изменяя направление действия силы, позволяет, например, поднимать груз, стоя на земле.
Рис. 5
Литература
Аксенович Л. А. Физика в средней школе: Теория. Задания. Тесты: Учеб. пособие для учреждений, обеспечивающих получение общ. сред, образования / Л. А. Аксенович, Н.Н.Ракина, К. С. Фарино; Под ред. К. С. Фарино. — Мн.: Адукацыя i выхаванне, 2004. — C. 73-75.
www.physbook.ru
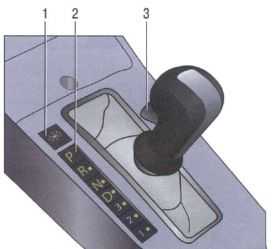
Рычаги управления двигателем - Sukhoi Superjet 100
РУД является электромеханической конструктивно-съемной единицей, которая считывает команды пилотов по управлению тягой и генерирует позиционные сигналы с избыточной информацией. Эту позиционную информацию получает цифровой блок управления двигателем (DECU), который затем дает команды исполнительным механизмам управления тягой на двигателях самолёта выполнять установку тяги. Двойные датчики положения измеряют позицию каждого рычага посредством беззазорной связи.
Кроме того, РУД включает в себя сервомотор автомата тяги с интерфейсом ARINC 429. РУД получает команды управления скоростью посредством информационной шины ARINC 429 самолета и генерирует визуальный и тактильный сигнал обратной связи, запуская рычаги, чтобы достигнуть скорости, на которую даёт команду вычислитель автомата тяги. Каждый рычаг тяги приводится в действие интегральным силовым приводом автомата тяги, состоящим из одного двигателя постоянного тока, зубчатых прямозубых цилиндрических/планетарных редукторов, а также тахометра, который обеспечивает обратную связь по скорости, чтобы замкнуть контур регулирования скорости при сервоуправлении. Каждый силовой привод также содержит муфту переключения на ручное управление на выходе силового привода, чтобы устранить заедание рычага в случае неисправности двигателя или зубчатого редуктора.
Внешний вид
Рычаги и кнопки РУД покрашены в черный цвет. Конструкция рычага обеспечивает полную амплитуду 74° хода, а также включает в себя переключатели A/T DISC и TO/GA. Корпус и световое табло рычагов РУД покрашены в серо-синий цвет. Жёлтая область в полоску на световом табло связана с реверсом тяги, а все надписи — ослепительно белые. Нижняя поверхность монтажного фланца соответственно подготовлена, чтобы обеспечить самое лучшее электрическое соединение с центральным пультом. Нанесены обозначения, показывающие рычаги “ENG L” и “ENG R”, подъёмный затвор “REV”, кнопки “TO/GA” и кнопки “A/T DISC”. Белые линии наносятся на каждой стороне каждого рычага для определениявыбранного положения.
Размеры и вес
Максимальный вес РУД составляет 19,5 фунтов (8,8 кг).
Размеры рычагов управления двигателей соответствуют стандарту LNF65211 для установки оборудования. Длина: 247,52 мм, ширина: 146 мм, высота: 303 мм.
Механические ограничители
Механические ограничители установлены для трёх положений ручек: малого газа (IDLE), максимальной тяги (APR), и максимальной реверсной тяги (MAX REV).
Дроссельный механизм NTO
У каждого рычага есть механизм возврата в положение нормального взлёта (NTO), который предотвращает перемещение рычагов в зону максимальной тяги (APR), если только не будет приложена значительная сила. Положение APR – на 52,5° впереди положения IDLE. Положение NTO — на 47,5° впереди положения IDLE, что служит «нормальным» передним механическим ограничителем рычагов дросселя.
Для перехода в режим APR пилоту необходимо приложить усилие до 45±9 фунтов (16-24 кг). Это позволяет получить дополнительные 5° движения рычажного механизма. Тягаможет быть уменьшена в зоне APR без дополнительного усилия, и механизм блокировки «ограничителя прохода» будет автоматически переустановлен. Электропитание не требуется для работы ограничителя прохода.
Реверс тяги
Предусмотрены поднимаемые пальцем рычаги реверса тяги, один на каждом РУД. Эти рычажки подпружинены с силой, направленной вниз, чтобы предотвратить неосторожное увеличение реверса тяги. Поднятие рычажка пальцем позволяет переход главных рычагов управления тягой из положения малого газа в положение полной тяги реверса. У подъёмных рычажков реверса есть также блокировка, которая препятствует их поднятию, когда главные дроссельные рычаги не находятся в положении режима малого газа.
У каждого рычага управления тягой имеется два положения фиксации реверса, которые определяют малый газ реверса (REV) и положение минимального газа реверса (REV MIN). Положение IDLE REV расположено на 9° сзади от IDLE; положение REV находится на 15.5° сзади от IDLE. Сила управления рычагами реверсивной тяги приблизительноравняется прямой тяге.
Фрикционное устройство рычагов
Фрикционное/контрольное устройство является неотъемлемой частью каждого блока рычага управления тягой. Данное устройство обеспечивает контроль пилотов, а также предотвращает произвольное перемещение рычага, вызванное экстремальной окружающей обстановкой (вибрация, ускорение и т.д.). Сила, которая требуется дляперемещения рычагов через фрикционное устройство, имеет номинальное установленное на заводе значение 2,0 +/- 0,5 фунтов (1 кг) на кнопках рычага дросселя, которая подтверждается как достаточная во время испытаний на надежность.
У каждого рычага есть своя собственная независимая фрикционная контрольная муфта, расположенная между главным рычагом и ходовой частью корпуса. Потеря или заедание фрикционного механизма одного рычага не оказывает никакого влияния на другой.
Датчики положения
РУД обеспечивает выработку сигналов команд позиционирования посредством двойных датчиков положения на каждом рычаге дросселя. Единичный отказ не вызывает показания обоими датчиками на одном рычаге идентичного положения, которое не отражает фактическое положение рычага (нет необходимости рассматривать очевидную полную поломку главного рычага РУД, которая может быть легко обнаружена пилотом).
Угловые зависимости РУД в отношении позиции датчиков положения:| APR | 52,5 | 81,375 | +/- 1,5 |
| NTO | 47,5 | 73,625 | +/- 2,5 |
| Выключатель BRAKE | 12 | 18,6 | +/- 4,0 |
| Обозначение CLIMB | 30,5 | 47,275 | +/- 2,5 |
| IDLE (малый газ) | 0 | 0 | +/- 0,5 |
| Выключатель T/R | -3,5 | -5,425 | +/- 2,5 |
| T/R IDLE Detent(ограничение) | -9 | -13,95 | +/- 2,5 |
| T/R MIN Detent | -15,5 | -24,025 | +/- 2,5 |
| T/R MAX | -21,5 | -33,325 | +/- 1,5 |
*Допуски являются общими для механических, установочных и электрических величин (включают температуру, нагрузку, частоту и возбуждение).
Выключатель автомата тяги «AT DISC»
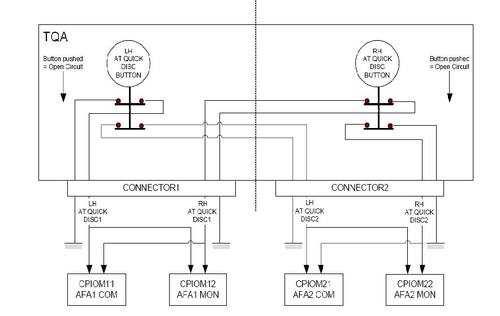
Выключатели автомата тяги «AT DISC» расположены на наружных сторонах ручек. Белые кнопки углублены, чтобы предотвратить случайное включение. Данный выключатель является выключателем мгновенного двухполюсного типа на два положения для обеспечения работы двух отдельных цепей схемы, которые связаны с помощью интерфейса с авионикой, как показано на рисунке. Когда любой из этих выключателей нажимается пилотом, изменение состояния выключателей посылается в каждый канал авионики через каждую из двух отдельных линий цепей схемы 0В/Open. Выключатели соответствуют MIL-S-8805 и способны переключать ток логического уровня (приблизительно 1мA).
Переключатель TO/GA
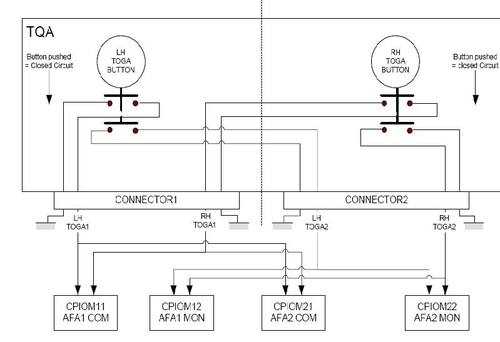
Переключатели Take-Off (взлёт) / Go-Around (уход на второй круг) расположены на поверхности задней части каждого РУД, ниже захватов. Такое размещение позволяет пилотам легко включать переключатель TO/GO с помощью их большого пальца кисти, предлагая эргономичную работу. Кнопки имеют немного утопленную форму для предотвращения случайного зацепления. Выключатель имеет мгновенный двухполюсный тип на два положения для обеспечения работы двух отдельных цепей схемы, которые связаны с помощью интерфейса с авионикой, как показано на рисунке. Когда любой из этих выключателей нажимается пилотом, изменение состояния выключателей посылается в каждый канал авионики через каждую из двух отдельных линий цепей схемы 0V/Open. Выключатели соответствуют MIL-S-8805 и способны переключать ток логического уровня (приблизительно 1мA).
Переключатели положения рычага
В дополнение к установленным на захватах выключателям, каждый рычаг, расположенный на РУД, содержит четыре изолированных от внешней среды переключателя (однополюсный тип на два положения) положения, выполненные в стиле микропереключателей, которые должны механически приводиться в действие поворотом РУД. Два переключателя на один рычаг приводятся в действие до включения режима «Малого газа реверса тяги» системы реверса тяги, и два переключателя на один рычаг приводятся в действие при положении впереди от положения BRAKE. Положения срабатывания и допуски перечислены в Таблице 1. Данные переключатели соответствуют MIL-S-8805 и способны переключать ток логического уровня (приблизительно 1мA).
Освещённая приборная доска
РУД включает в себя встроенную освещённую приборную панель. На приборной доске подсвечены обозначения с текстом и пазы рычагов, с использованием светодиодной технологии. Обозначения следующие: APR, NTO, CLIMB, IDLE, IDLE REV, MIN REV и MAX REV. Текстовые надписи и пазы рычагов обозначаются на приборной доске с каждой стороны каждого рычага. Уровень подсветки формируется системой освещения кабины.
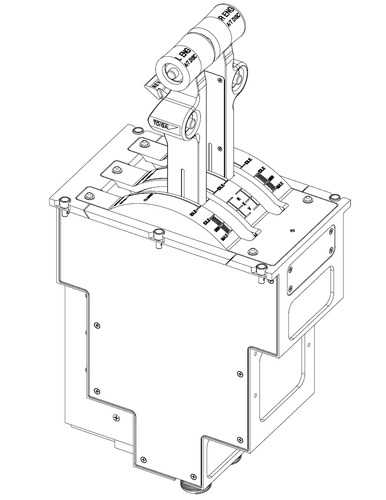
Главная функция подсистемы регулирования скорости сервомотора РУД — обеспечивать независимое регулирование состояний установки скорости рычагами на максимальной скорости ±15 градусов/секунду на основе команд, получаемых от авионики и отдельных независимых дискретных компонентов.
Данная подсистема состоит из модуля электронного управления и двух силовых приводов сервомотора, показанных на рисунке. Каждый рычаг приводится в действие интегральным силовым приводом автомата тяги, состоящим из одного бесщёточного двигателя постоянного тока, прямозубой цилиндрической/планетарной передачи, а также тахометра, который обеспечивает обратную связь по скорости для замыкания контура регулирования скорости сервомотора. Каждый силовой привод содержит ограничительную муфту, чтобы предотвращать заедание рычага в случае неисправности силового привода.
Электрическая схема в управляющем модуле электронной аппаратуры обеспечивает двигателям постоянного тока питание приводов с ограничением тока, а бортовому радиоэлектронному оборудованию — регулирование скорости двигателя и связь. Сила ручного управления рычагом должна быть в пределах от 5 фунтов до 8 фунтов. Программного обеспечения в электронной аппаратуре контроля не существует, а есть только программируемое логические элементы (PLD).
Регулирование скорости рычагов
Цифровые команды по скорости принимаются управляющим модулем по шине ARINC 429 от авионики и преобразовываются в их аналоговые эквиваленты. Бесщёточные тахометры, расположенные на сервомоторах, предоставляют необходимую информацию по обратной связи управления скоростью. Модуль электронного управления демодулирует сигналы тахометра и использует для замыкания сбалансированного контура регулирования скорости каждого двигателя.
Дискретная команда включения автомата тяги
Включение или выключение автомата тяги производится по дискретному сигналу от авионики (28В). Функциональные структура такова, что входной сигнал 28В включает привод РУД.
15 May 2013 11:47 (опубликовано: Monya Katz)
Если вам понравилась статья, не забудьте поставить "+"
Читайте далее
- Про мексиканские самолеты и новый локатор Суперджета - Из обсуждений свежей фотографии машины номер 95023 Матроскин спросил:а разве у мексиканских бортов будет российская регистрация? Engineer_2010: По поводу самолёта для «Интерджета» не стоит строить теорий заговора на пустом месте, ибо бортовые...… (+27)
- РУДы и реверс - Вопрос (Ole_): Коллеги с ГСС, у вас на самолете реверс как включается - тем же РУДом или РУР есть тоже? Ответ (Инженер 2010): Реверсы включаются теми же РУДами. Для их перевода из положения IDLE в положение MIN.REV необходимо отжать вверх гашетки...… (+9)
- Идеология кабины пилотов - интересно, что стало лучше по сравнению с более простой идеологией, характерной для 90-х годов Дело, конечно, совсем не в «железе» и не в том, из стали или титана изготовлены сами опоры или подкосы шасси. Идеология оборудования, установленного на...… (+5)
- Почему сайдстик, а не штурвал? - Инженер2010: На начальном этапе формирования облика самолёта, регулярно, приблизительно раз в полгода, действительно проводились совещания с представителями Авиакомпаний. На этих встречах уточнялись пожелания эксплуатантов как по составу, так и по...… (+5)
- Описание интерьера кабины экипажа - СвернутьРаскрыть Содержание Структура и функции элементов системы интерьер кабины экипажа Боковые консоли Консоль инспектора Гардероб Облицовочные панели Бытовое вспомогательное оборудование Декоративные элементы системы вентиляции Структура и...… (+4)
- Радар Суперджета: режим обзора земной поверхности - 7 февряля 2013 состоялся завершающий полёт по оценке нового метеолокатора. Полет был по 3000-км маршруту - к Азовскому и Чёрному морям, для оценки режима обзора земной поверхности (Map Mode). В тех краях много характерных ориентиров - населённые...… (+4)
- Система авиационной связи ACARS - Сегодня, 27 ноября 2012, во время перелёта обратно в Жуковский, над Атлантикой, протестировали систему ACARS. Запросили погоду из Питера. Всё получилось :) Завершается «обкатка» этой системы. Скоро система будет работать и на серийных SSJ 100. ...… (+4)
Случайные статьи
- Отчет от Chevychase - Вместо дерьма, постоянно летящего в раскрученный вентилятор, попробую, насколько это возможно сделать объективно, высказать свои личные впечатления и наблюдения от постоянного пользования этим самолётом в качестве пассажира. Я хоть и пакс, но, скажем так, продвинутый :) Итак, по работе часто летаю в...… (+8)
- Фары - Оборудование светотехническое предназначено для обозначения самолета во время наземной стоянки, рулежки и полета. Для увеличения дальности определения местоположения самолета применены аэронавигационные маяки белого и красного цвета. Состав системы внешнего светотехнического оборудования − Внешнее...… (+1)
Использование материалов сайта разрешается только при условии размещения ссылки на superjet100.info
superjet.wikidot.com
Биомеханика рукопашного боя - Боевые искусства
Плоскости, оси, степени свободы
В трехмерном мире существуют три плоскости: фронтальная, горизонтальная, вертикальная.
Любое тело которое находится в пространстве, имеет 6 степеней свободы: 3 постоянных, вращательных вокруг трех осей.
Если тело закреплено в одной точке, то оно может совершать только вращательные движения (3 степени свободы).
Если тело закреплено в двух точках, то оно имеет одну степень свободы и пять степеней связанности.
Если тело закреплено в трех точках, у него шесть степеней связанности.
Все движения в суставах вращательные.
Движение происходит вокруг оси, в плоскостях, перпендикулярных этим осям.
Вся работа в суставах строится по принципу рычага. Все костные рычаги приводятся в действие при помощи мышц. Все мышцы работают при помощи рычагов.
Рычаги
Расстояние между точкой приложения силы и точкой вращения - это рычаг.
Рычаг первого рода - двуплечный (рычаг равновесия).
Модель сустава- крепление черепа к позвоночнику.
Рычаг второго рода - одноплечный (бывают рычаг скорости и рычаг силы).
Рычаг скорости дает выигрыш в скорости при совершении работы.
Модель сустава: локтевой, с грузом на ладони.
Рычаг силы дает выигрыш в силе.
Модель сустава: стопа на пальцах.
1 2 3: 900
В тему:
|
boevieiskusstva.narod.ru
Рычаги и маятники в теле человека
Разбиение тела человека на звенья позволяет представить их как механические рычаги и маятники, потому что все эти звенья имеют точки соединения, которые можно рассматривать либо как точки опоры (для рычага), либо как точки отвеса (для маятника).
Рычаг – всякое твердое тело, которое вращается около оси и на которое действуют две силы: одна движущая (сила мышц), другая – сила сопротивления. Рычаг характеризуется плечом - расстоянием между точкой приложения силы и точкой вращения.
Каждый рычаг имеет точку опоры – ось рычага, точки приложения двух взаимно противодействующих сил и плечи рычага.
В зависимости от расположения сил вращения различают рычаги 1, 2 и 3 рода.
В рычаге 1 рода (двуплечий рычаг) ось вращения находится между точками приложения сил и обе силы имеют одинаковое направление (череп).
Рычаг второго рода (одноплечий) имеет ось вращения на конце и точки приложения сил находятся по одну сторону от оси вращения. Приложенные силы имеют противоположные направления. Мышечная сила действует на короткое плечо рычага (рука с удержанием груза).
Рычаг третьего рода является одноплечим, но мышечная сила действует на длинное плечо рычага.
По сути костные рычаги являются составными, нагруженными на конце, в них сложные механизмы передачи работы мышц на плечи рычага.
«Золотое» правило механики: выигрывая в силе, проигрываешь в расстоянии и наоборот. Условно можно выделить рычаг скорости и рычаг силы в зависимости от того, что преобладает в их действиях. Рычаг скорости дает выигрыш в скорости при совершенствовании работы. Пример – локтевой сустав с грузом на ладони. Рычаг силы дает выигрыш в силе. Пример – стопа на пальцах.
Звено тела, продолжающее после разгона движение по инерции, имеет сходство с физическим маятником и для них применимы те же формулы, что и для простых механических маятников. Основные вывод их них – собственная частота колебаний не зависит от массы качающегося тела, но зависит от его длины (при увеличении длины частота колебаний уменьшается). Маятник в поле действия силы тяжести, выведенный из равновесия, сначала под действием момента силы тяжести качается вниз, а далее, затрачивая приобретенную кинетическую энергию, поднимается вверх по инерции. Период качения маятника: , где I – момент инерции маятника относительно оси, m - его масса, g - ускорение свободного падения, r - радиус до центра масс.
Колебательные движения можно встретить при выполнении циклических движений, где многократно повторяется одинаковый ряд движений.
Делая частоту шагов при ходьбе или беге или гребков при плавании или гребле резонансной (т.е. близкой к собственной частоте колебаний руки или ноги), удается минимизировать затраты энергии. При наиболее экономичном сочетании частоты и длины шагов или гребков человек демонстрирует существенный рост работоспособности. Простой пример: при беге высокий спортсмен имеет большую длину шага и меньшую частоту шагов, чем более низкорослый спортсмен, при равной с ним скорости передвижения.
При воздействии на упруго-вязкую систему циклической нагрузки амплитуда отклика системы будет зависеть от соотношения между частотой воздействия и собственной частотой системы. Максимальную амплитуду перемещения системы можно наблюдать, если частота действия силы будет равна собственной частоте колебания мышечного компонента биомеханической системы. Это и есть резонанс. В этом случае значение силы, необходимой для получения заданной амплитуды, будут минимальными.
Известны собственные частоты колебания отдельных частей тела человека (Гц) глаза 12-17, горла – 6-27, грудной клетки – 2-12, рук и ног 2-8, головы – 8-27, живота 4-12. Большой разброс отражает различия в морфологии.
biofile.ru